中国团队获自动驾驶权威测评第一,车辆可识别“厘米级”障碍物
来源:未知
编辑:admin
时间:2020-05-11
导读:【环球网科技综合报道】达摩院再获自动驾驶权威测评第一。5月8日消息,在自动驾驶权威数据集SemanticKITTI上,来自中国的达摩院凭借全新算法在单帧3D点云语义分割排行榜获得第一。该技术用于达摩院的无人物流车后,大幅提升了车辆的环境精细化理解能力,使车辆能够识
【环球网科技综合报道】达摩院再获自动驾驶权威测评第一。5月8日消息,在自动驾驶权威数据集SemanticKITTI上,来自中国的达摩院凭借全新算法在“单帧3D点云语义分割”排行榜获得第一。该技术用于达摩院的无人物流车后,大幅提升了车辆的环境精细化理解能力,使车辆能够识别“厘米级”障碍物。
KITTI数据集是全球最权威的自动驾驶计算机算法评测数据集,为促进基于激光的语义分割研究,KITTI推出了细分数据集Semantic KITTI,通过全类别分割平均交并比(mIOU)和整体准确率(accuracy)两大指标,考察参赛者的技术能力。达摩院团队在两项指标的评比中均拿下第一。
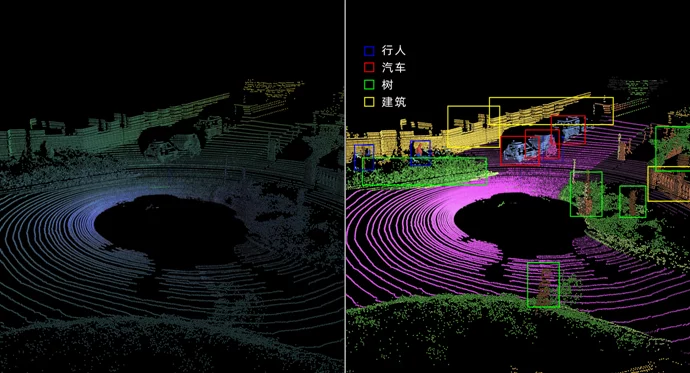
点云(Point Cloud)是拥有三维坐标、强度等信息的激光点的集合,是计算机视觉领域常用的三维数据表示方式。自动驾驶车辆通常借助激光雷达、摄像头、毫米波雷达等传感器识别环境信息。对于激光雷达获取的周围环境的3D点云,识别每个点的语义标签,就是“3D点云语义分割”。
除了行人、车辆等常规检测目标,道路周围的建筑、绿化、不明障碍物也会影响自动驾驶车辆的驾驶行为,3D点云语义分割技术的目标,便是帮助车辆更精细地理解道路环境。
达摩院自动驾驶实验室资深算法专家卿泉介绍,业界通用的点云局部上下文特征建模方法难以满足自动驾驶实时、精准的感知需求。达摩院提出的新算法以激光点为载体,结合每个3D点在鸟瞰、前视等视角下的邻域特征,通过多层级联编码进行特征学习,大大增强3D点的特征表示能力,由此提高了语义识别的准确性。
该算法应用于达摩院的无人物流车后,车辆对障碍物的精细化识别水平大幅提升。比如在行驶途中遇到临时拉起的警戒线,即便线宽仅有3厘米,物流车也能轻松识别并绕道而行。
责任编辑:admin

感谢您的支持,我会继续努力的!

扫码打赏,你说多少就多少

打开支付宝扫一扫,即可进行扫码打赏哦
相关文章:
相关推荐:
- [汽车]70迈提供上半马急救骑行队用车,安全守护6000余名运动员
- [汽车]从福特领裕的五六七座,看今天社会家庭结构变迁
- [汽车]我国1-11月新能源汽车销量增速由负转正
- [汽车]大搜车智云:“√”型反弹 11月新能源车环比大涨41%创新高
- [汽车]自建基地投产、自研平台首车下线,宝能汽车全生态产业链格局落地
- [汽车]汽车融资租赁讲清楚了吗?记者实测弹个车毛豆新车花生好车
- [汽车]守护中国速度,传递中国力量――昆仑润滑献礼新中国成立71周年
- [汽车]向国产车致敬!奔腾T99运动版火了,超级配置名不虚传
- [汽车]青岛首批本土生产 新宝骏E300/E300Plus国庆假期后正式下线
- [汽车]4月份汽车产销继续回暖
网友评论:

栏目分类
最新文章
热门文章